")
")
")








Description
High Precision for Compact Automation Systems
Compared with traditional open-loop stepper systems, this NEMA17 closed loop stepper motor significantly reduces the risk of missed steps and positioning errors. This makes it an ideal solution for applications where consistent accuracy directly impacts product quality and system performance.
Stable Torque and Anti-Stall Performance
This closed-loop control architecture eliminates resonance issues commonly found in traditional stepper motors, resulting in lower vibration, reduced noise, and smoother operation. These characteristics make it particularly suitable for high-precision environments such as engraving, prototyping, and small-scale automated production.
Precision Manufacturing and Engineering Design
Its rotor assembly is dynamically balanced to minimize vibration at higher speeds, improving mechanical smoothness and extending service life. The integrated encoder is precisely aligned with the motor shaft, providing real-time feedback with high resolution for accurate motion correction.
Industrial-grade ball bearings are used to support both radial and axial loads, ensuring long-term durability in continuous operation environments. The housing is CNC-machined to maintain tight dimensional tolerances, enhancing structural rigidity and overall performance consistency.
Flexible Integration for Modern Systems
The NEMA17 closed loop stepper motor supports pulse-direction control and closed-loop driver systems, making it easy to integrate into existing CNC and automation platforms. Optional configurations such as gearboxes, lead screws, and extended shafts further expand its application range.
NEMA17 Closed Loop Stepper Motor – Technical Specifications
Electrical Characteristics
- Product Type: NEMA17 Closed Loop Stepper Motor (Compact servo-enhanced stepper system)
- Control Mode: Pulse/Direction with real-time encoder correction
- Supply Voltage: 12V DC / 24V DC / 36V DC (application-dependent)
- Phase Current: 1.2A – 2.8A per phase (adaptive current regulation)
- Encoder System: Optical incremental encoder, 400–1000 PPR (optional higher resolution)
- Feedback Function: Closed-loop position correction with anti-step-loss control
Mechanical Structure
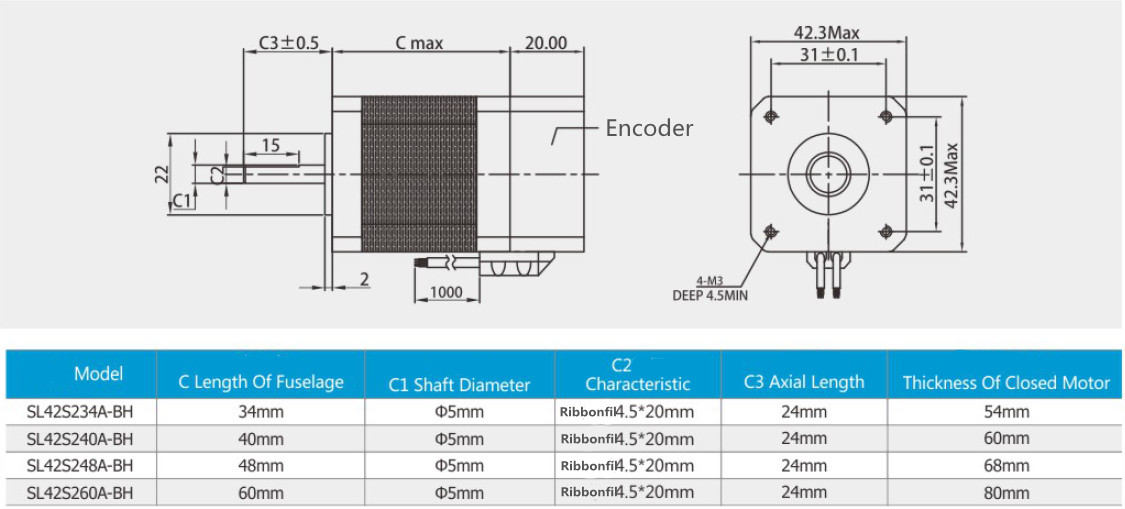
- Frame Size: 42 mm × 42 mm (NEMA17 standard)
- Motor Length: 34 mm – 60 mm (torque variant dependent)
- Shaft Diameter: 5 mm / 6.35 mm (keyed or smooth shaft options)
- Bearing Type: High-precision dual ball bearing system
- Rotor Design: Precision balanced rotor for low vibration operation
- Protection Level: IP30 standard / IP54 optional sealed version
Performance Data
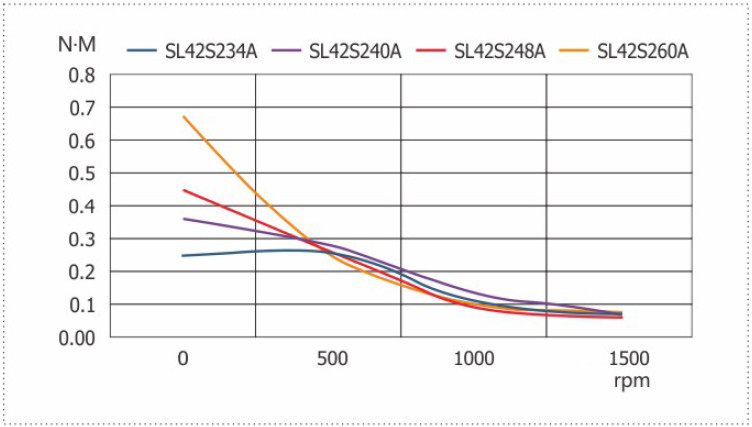
- Holding Torque: 0.25 N·m – 0.75 N·m (model dependent)
- Closed-loop Torque Compensation: Up to +15% dynamic correction
- Speed Range: 0 – 2500 RPM stable operating range
- Position Accuracy: ±0.05° closed-loop correction precision
- Anti-Stall Feature: Automatic load compensation with real-time adjustment
- Noise Level: ≤50 dB (low resonance optimized design)
Environmental Conditions
- Operating Temperature: -20°C to +50°C
- Storage Temperature: -40°C to +80°C
- Cooling Method: Natural air cooling (compact thermal design)
- Humidity Range: 20% – 85% RH (non-condensing)
System Compatibility
- Compatible with CNC controllers, 3D printer boards, and motion driver systems
- Supports encoder feedback drivers and hybrid servo control modules
- Suitable for compact automation, robotics, and precision instruments