-150x150.jpg)

Description
Unlike traditional open-loop stepper systems, this NEMA24 closed loop stepper motor eliminates step loss by monitoring rotor position in real time. This ensures that every command pulse is accurately executed, significantly improving system reliability and reducing downtime caused by positioning errors.
Superior Torque and Motion Stability
The closed-loop control system dynamically adjusts current input based on encoder feedback, effectively suppressing resonance and vibration. This results in quieter operation and improved mechanical stability, which is essential for precision-driven applications such as CNC machining and automated inspection systems.
Precision Engineering and Manufacturing Quality
The NEMA24 closed loop stepper motor is manufactured using high-permeability silicon steel laminations to maximize magnetic efficiency and minimize energy loss. The stator windings are constructed with high-purity copper to ensure excellent conductivity and thermal resistance during continuous operation.
Its rotor assembly undergoes precision dynamic balancing to reduce vibration at high speeds. The integrated encoder system is carefully aligned with the motor shaft, enabling accurate real-time position detection and feedback control.
Industrial-grade deep groove ball bearings are used to support both radial and axial loads, ensuring long service life even under harsh operating conditions. The motor housing is CNC-machined for tight tolerance control, improving structural rigidity and overall performance consistency.
Flexible Integration for Automation Systems
The NEMA24 closed loop stepper motor supports multiple control modes, including pulse-direction input and closed-loop current regulation. It is compatible with modern motion controllers and CNC driver systems, allowing seamless integration into existing automation architectures.
Optional configurations such as planetary gearboxes, electromagnetic brakes, and extended shaft designs further enhance adaptability across different mechanical systems. This flexibility makes it suitable for both new equipment design and servo system replacement upgrades.
NEMA24 Closed Loop Stepper Motor – Technical Specifications
Electrical Characteristics
- Product Type: NEMA24 Closed Loop Stepper Motor (Hybrid servo-grade stepper system)
- Control Mode: Pulse/Direction with real-time closed-loop correction
- Supply Voltage: 36V DC / 48V DC / 60V DC (optional industrial configurations)
- Phase Current: 2.8A – 6.0A per phase (adaptive current regulation)
- Encoder Type: Incremental optical encoder, 1000–2500 PPR (optional higher resolution)
- Feedback Function: Real-time position correction with anti-step-loss algorithm
Mechanical Structure
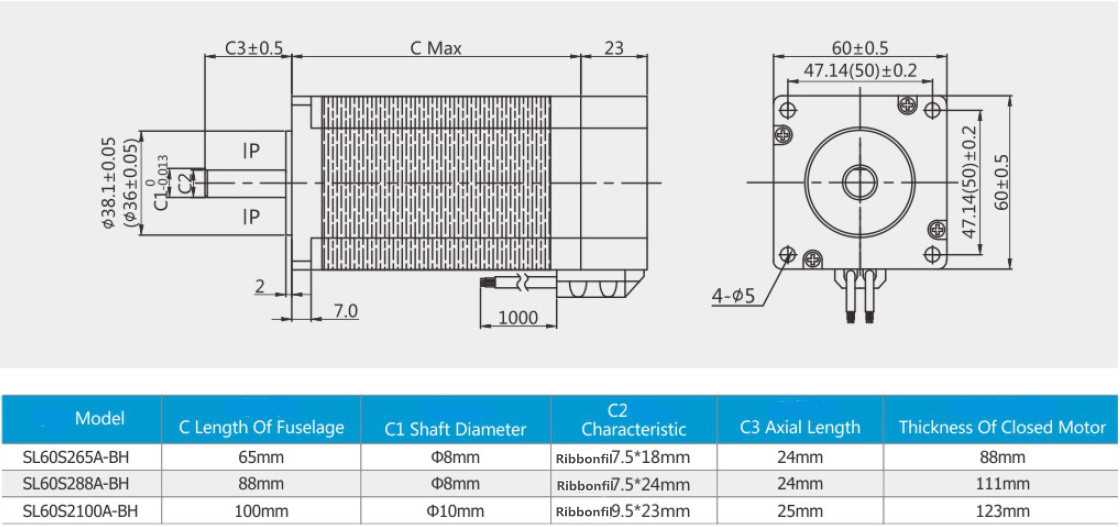
- Frame Size: 60 mm × 60 mm (NEMA24 standard)
- Motor Length: 80 mm – 120 mm (depending on torque variant)
- Shaft Diameter: 8 mm / 10 mm / 12 mm (keyed or smooth optional)
- Bearing System: Reinforced dual-ball bearing for high radial load stability
- Rotor Balance: Precision dynamic balancing for low vibration operation
- Protection Level: IP54 standard / IP65 sealed optional
Performance Data
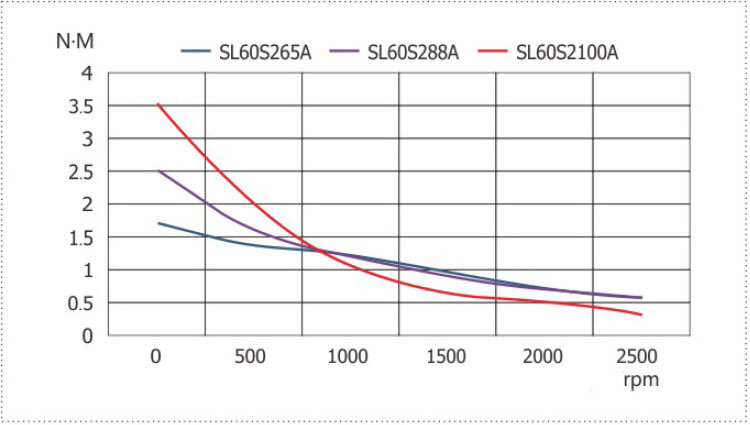
- Holding Torque: 2.0 N·m – 7.5 N·m (model dependent)
- Dynamic Torque Compensation: Up to +18% under closed-loop control
- Operating Speed Range: 0 – 2000 RPM stable zone
- Position Accuracy: ±0.03° closed-loop correction precision
- Anti-Stall Feature: Automatic load compensation and step correction
- Noise Level: ≤55 dB (low resonance optimized design)
Environmental & Thermal Conditions
- Operating Temperature: -20°C to +55°C
- Storage Temperature: -40°C to +80°C
- Cooling Method: Natural convection / optional forced cooling support
- Humidity Tolerance: 20% – 90% RH (non-condensing)